停靠泊智能輔助系統
2025年3月22日 17:35

系統概述
使用拖輪協助靠泊作業時,可以使用我司船用避障雷達,該系統可有效減少大型船舶拖帶作業時的視線盲區,解決能見度不高、風浪天氣等惡劣條件下的拖輪避碰難題,為拖輪航行和作業提供安全保障。
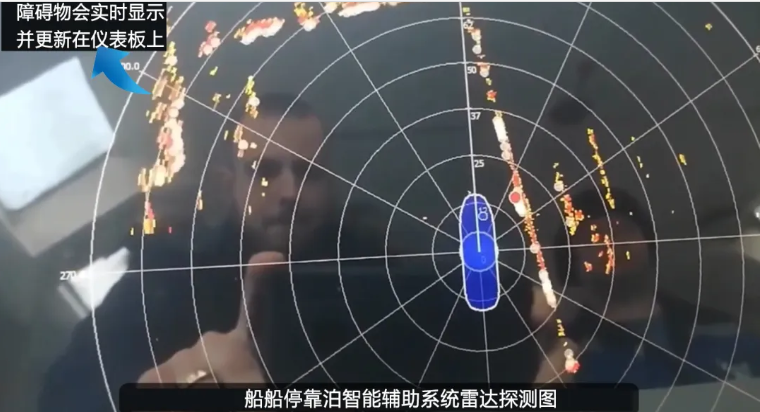
在拖輪作業中,聚焦拖輪桅杆、橋樓與被作業船體之間的方位、距離和接近速度等重要信息,我司系統終端會動態顯示、帶有視覺和聲音報警的危險檢測傳感器實時語音預警,水平精度可達0.15米,0到600米範圍,可有效避免拖輪桅杆、橋樓等視野盲區部位與被作業船體之間發生碰撞。雷達軟件運用船舶輪廓和船上雷達的幾何位置數 據來計算船舶到障礙物的距離。
功能亮點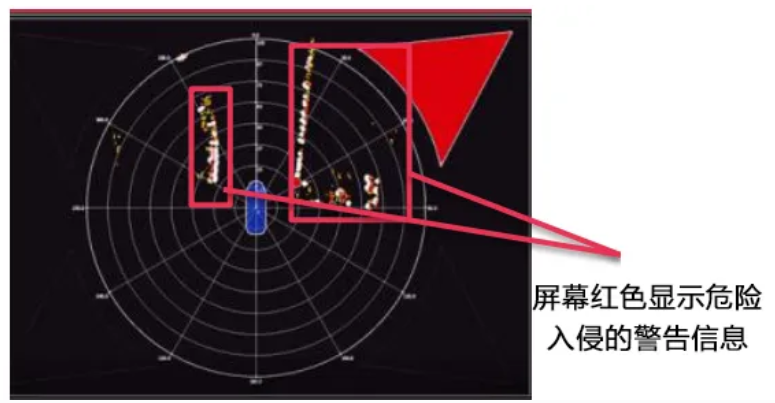
1️⃣ 全流程智能化:覆蓋數據採集、分析、決策到執行反饋的全流程,減少人工干預,提升作業自動化水平。
2️⃣ 多維度精準保障:融合多種傳感器數據和先進算法,實現對環境和拖輪狀態的精準感知與分析,降低安全風險。
3️⃣ 高效協同:實現拖輪與港口調度系統的實時信息交互與協同,優化資源配置,提高港口整體運營效率。
4️⃣ 靈活適配:可根據不同港口、不同拖輪的實際需求進行定製化部署和功能擴展。
應用領域
✅大型商業港口:適用於集裝箱碼頭、散貨碼頭等,提升船隻進出港效率,保障港口繁忙作業安全有序。
✅內河港口:應對內河複雜航道和多變水情,輔助拖輪安全停靠泊,降低事故發生率。
✅石油化工碼頭:在危險品運輸作業中,提高拖輪停靠泊的精準性和安全性,避免因操作失誤引發的重大安全事故。